Arytmetyka...
Arytmetyka...
Literatura: O.B. Arushanyan, S.f. Zalotkin, Chyslennye reshenie
obyknovennykh differencyalnych uravnenyi.
Podstawy arytmetyki komputerowej
Komputer nie jest idealnym rachmistrzem. Z powodu swojej dyskretnej
budowy wciąż robi błędy. Operacje w komputerze wykonywane są na
skończonych zbiorach liczb, a nie na wszystkich liczbach
rzeczywistych.
Podstawowe trzy źródła błędów obliczeń komputerowych:
- błędy danych wejściowych
- zamiana procesów nieskończonych skończonymi
- dokładność reprezentowania liczb w komputerze (zaokrąglenia)
Nie da się uniknąć żadnego z wymienionych błędów. Należy więc
kontrolować ich ewolucję w toku prowadzonych rachunków.
Zbiór liczb rzeczywistych ma taką własność, że między dowolnie bliskie
dwie liczby można wstawić inne. Jest gęsty. Zbiór liczb maszynowych
jest natomiast zbiorem dyskretnym, skończonym.
Różnice te określają dokładność arytmetyki maszynowej.
Maszynowe systemy liczbowe
Ograniczona długość słów maszynowych, które tworzą elementy
pamięci komputerów, pozwala jedynie na to by każda liczba była
reprezentowana przez ustaloną liczbę cyfr i znak. Istnieją dwa
sposoby reprezentowania liczb w komputerze.
§ a
Część ułamkowa liczby zawiera określoną stałą liczbę cyfr.
Jest to reprezentacja z ustaloną kropką dziesiętną, przecinkiem
dziesiętnym.
Charakteryzują ją trzy parametry:
- b - podstawa systemu liczbowego
- t - liczba znaków w całej reprezentacji
- f - liczba cyfr w części ułamkowej.
Zbiór liczb scharakteryzowany tymi trzema parametrami będziemy
dalej oznaczać przez P(b,t,f).
Dla przykładu rozpatrzmy zbiór P(10,4,1). Zawiera on 19999 liczb.
Kolejne liczby są równoodległe od siebie. Dowolna liczba
rzeczywista z przedziału (-1000, 1000) może być zapisana w tym
systemie obliczeniowym przez fix(x) ∈ P(10,4,1) z błędem absolutnym
nie większym niż 0.05. Np. x=865.54 reprezentowana jest w
P(10,4,1) przez 865.5, a błąd absolutny wynosi 0.04.
Zobaczmy teraz jak zachowuje się błąd względy (x−fix(x))/x,
x ≠ 0. Dla liczby 865.54 błąd względny
wynosi 0.04/865.54 ≈ 0.00055 (=0.005%). Z drugiej strony,
jeśli x=0.86554 to fix(x)=000.9 i błąd względny wynosi 4%.
Oznacza to, że chociaż liczby zbioru P(10,4,1) tworzą sieć
jednorodną na przedziale (-1000,1000) to względna gęstość tej
sieci nie jest jednorodna. Jest to mankament wszystkich układów z
ustaloną kropką.
§ b
Większość komputerów korzysta z innego układu liczbowego F(b,t,L,U)
reprezentowania liczb zwanego układem z ruchomą kropką (floating point).
Układ taki charakteryzują cztery parametry:
- b - podstawa układu liczb
- t - liczba cyfr w reprezentacji mantysy liczby (ułamkowej
części liczby; dokładność reprezentacji)
- L, U - dolna (L) i górna (U) granica przedziału
zmienności liczb.
Dowolna, niezerowa liczba jest postaci
|
x=±(d1/b+d2/b2+ ... dt/bt)×be |
|
i zapisuje się ją jako
gdzie cyfry mantysy d1, d2, ..., dt spełniają warunki
|
1 ≤ d1 < b , 0 ≤ di < b , 2 ≤ i ≤ t , |
|
a wykładnik e jest liczbą całkowitą taką, że
Liczba zero jest reprezentowana przez
Jeżeli dla dowolnego x ∈ F, x ≠ 0,
wartość d1=1 (tak jak to jest w przypadku właśnie wprowadzonego
układu F), to taki układ nazywa się znormalizowanym.
Liczby należące do F tworzą sieć niejednorodną o jednorodnej
gęstości względnej.
Dla przykładu rozpatrzmy układ F(10,4,−2,3). Liczbie 865.54
odpowiada w F reprezentant postaci .8655×103, a liczbie
0.86554 reprezentant .8654×100. W obu wypadkach błędy
względne są identyczne i równe 0.005%.
Rysunek przedstawia dwa układy zliczania P(2,4,2) i F(2,3,−1,2).
P zawiera 31 liczb, a F 33 liczby.
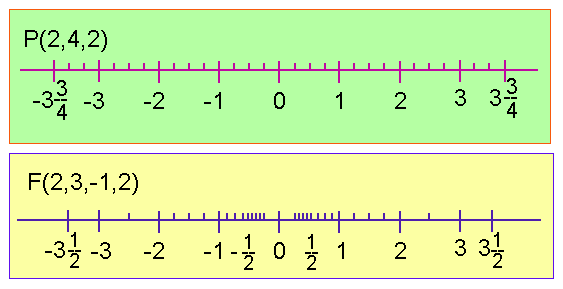
Ogólnie, układ F zawiera
liczb.
Zadanie 1: Ilość liczb. Ile jest liczb w systemie liczbowym F(10,7,-20,20)?
Parametry arytmetyki maszynowej
W praktyce, do charakteryzowania układu F(b,t,L,U) używa się
parametrów σ, λ, ϵ, które można wyrazić
przez b, t, L, U.
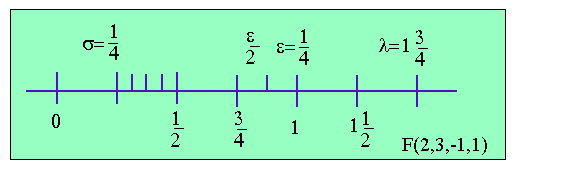
Zilustrujemy to na przykładzie F(2,3,−1,1). Układ ten zawiera zero
oraz wszystkie liczby, których dwójkowa postać jest następująca:
gdzie −1 ≤ e ≤ 1, a d2 i d3 są zerem lub jedynką.
Mamy dwie możliwości reprezentowania znaku (+ i −),
trzy możliwości dla e (−1, 0, 1) oraz
cztery możliwości reprezentowania ułamka (0.100, 0.101,0.110, 0.111). Układ F zawiera więc 2·4·3+1=25 liczb
maszynowych. W celu uproszczenia rozważań zamienimy ułamki
dwójkowe na zwykłe. Mamy w F następujące ułamki: 1/2, 5/8,
3/4 i 7/8. (Np.
(0.101)2=1×2−1+0×2−2+1×2−3=1/2+1/8=5/8).
W rozpatrywanym układzie najmniejszą liczbą jest
σ = 1/2×2−1=1/4, a największą
λ = 7/8×21=7/4 (patrz rysunek).
Odległość ϵ między liczbą 1 i liczbą następną układu
F ( > 1) nosi nazwę maszynowego epsilon. Jest to jeden z
najważniejszych parametrów charakteryzujących dany układ liczbowy.
Jest on miarą "dyskretności" układu.
Ważna własność F: odległość między x ∈ F i liczbą
sąsiednią jest nie mniejsza niż |x|ϵ/b i nie większa niż
ϵ|x| (jeśli x nie sąsiaduje z zerem).
Odległość ϵ/b z lewej strony 1 i epsilon z prawej są
ważnymi charakterystykami przy pomiarach odległości między
kolejnymi liczbami układu F.
Parametry σ, λ i ϵ dane są przez b, t, L
i U następująco:
W celu lepszego zrozumienia sensu parametrów σ, λ i
ϵ rozpatrzmy układ F(b=10, t=6, L=−100). W tym przypadku
ϵ = 10−5, σ = 10−101. Prócz tego pomiędzy zerem i
σ nie ma żadnej liczby, która należy do F. Jednocześnie w
przedziale [σ, 10σ] znajduje się 899999 liczb z układu
F.
Na ostatnim rysunku widać, że w pobliżu σ odległości
między liczbami układu F są mniejsze od σ. Wynika stąd,
że liczb tych nie można otrzymać przez dodawanie ich; można je
dostać tylko w wyniku obliczania wyrażeń arytmetycznych.
Inne własności systemu F. Jeśli L ≤ e < U to pomiędzy liczbami
be−1 i be znajduje się (b−1)bt−1+1 liczb z F i są one
rozłożone jednorodnie z krokiem be−t=be−1ϵ. Jeżeli x,y ∈ F, be−1 ≤ |x| ≤ be, be−1 ≤ |y| ≤ be, to różnica
x−y wyliczana jest w F dokładnie, tzn. x−y ∈ F (z pożyczaniem).
Odległość między dwoma liczbami z F z wykładnikiem e wynosi
be−1ϵ.
Operacje arytmetyczne nad liczbami z F są przestawne (komutują)
jeśli ma miejsce poprawne zaokrąglanie, nie są jednak dla nich
spełnione prawa łączności i rozdzielczości.
Jeżeli liczbę z F podzielimy (pomnożymy) przez b to odległość
od niej do liczby następnej z F zmniejszy się (zwiększy się)
dokładnie o czynnik b.
Jeżeli x i x+l są sąsiadami z F i liczbę x pomnożymy przez
y/ź, gdzie y ∈ F, to pomiędzy y i y+l znajdzie się około
|x/y| liczb z F.
Zadanie 2: Granice systemów liczbowych. Podaj najmniejszą dodatnią
i największą liczbę w systemie F(10,7,-20,20).
Zadanie 3: Najmniejsza liczba znacząca. Oblicz EPS maszynowe
dla systemu liczbowego F(10,7,-20,20).
Błędy zaokrągleń
Zastanowimy się teraz nad różnicami w obliczeniach w układzie
liczbowym F i w zbiorze liczb rzeczywistych. Sedno tych róznic
polega na tym, że wiele operacji wykonanych na liczbach z F daje
wyniki, które do F nie należą. Dlatego też aby pozostać w F
(zapisać wynik w pamięci komputera) musimy zastąpić prawdziwy wynik
liczbą z F, a więc dokonać przybliżenia. To z kolei oznacza, że
pojawił się błąd zaokrąglenia.
Mamy tutaj dwa przypadki, w których powstają błędy. Z pierwszym
spotykamy się tam gdzie wykładnik e wyniku nie spełnia równości
L ≤ e ≤ U. Jeśli e < L, to |x| < σ mamy tzw.
antynadmiar, a jeśli e > U to |x| > λ - nadmiar.
Drugi przypadek pojawia się tam gdzie mantysa (część ułamkowa)
posiada więcej cyfr niż t. Dla przykładu w F(2,3,−1,2) mamy
|
.110×20+.111×20=.1101×21 (3/4+7/8=13/8) . |
|
Wynik dodawania nie należy do F ponieważ do zapamiętania jego
mantysy potrzeba czterach cyfr. Podobnie iloczyn
|
.111×20 ×.110×20=.10101×20 (7/8×3/4=21/32) |
|
nie należy do F. Rozpatrywana sytuacja w przypadku mnożenia
pojawia sią bardzo często.
Chcąc by wynik leżał w F musimy go więc przybliżyć liczbą z
F - zaokrąglić wynik. Można to zrobić na wiele sposobów.
Załóżmy, że wynik jest postaci
|
.d1d2... dtdt+1... dn ×be , |
|
gdzie L ≤ e ≤ U. Pierwszy sposób zaokrąglania polega na
odrzuceniu cyfr dt+1... dn po cyfrze dt Drugi sposób
zaokrąglania, zwany prawidłowym polega na wzięciu części
ułamkowej zbudowanej z t pierwszych cyfr następującej sumy
|
d1 d2 ... dtdt+1... + b/2 . |
|
Odpowiada to dodaniu b/2 ×b−(t+1) do liczby .d1d2...dtdt+1... dn×be.
Dla przykładu, liczbie .1101×21 w zbiorze F(2,3,−1,2)
przypisuje się liczbę .110×21 w metodzie odrzucania i
liczbę .111×21 w metodzie zaokrąglania prawidłowego.
Liczbie .10101×20 odpowiada w F .101×20 w obu
wypadkach.
Podane sposoby zaokrąglania prowadzą do błędów zaokrąglania. Mówiąc
dokładniej, błąd zaokrąglania jest różnicą fl(x)−x, gdzie x jest
liczbą rzeczywistą z L ≤ e ≤ U, a fl(x) jest jej reprezentacją
maszynową. Można wprowadzić wielkość δ(x) zwaną względnym
błędem zaokrąglenia, który pojawia się w liczbie fl(x), (x ≠ 0):
która spełnia nierówność
Przykład.
Pokażemy to. Liczby z przedzialu 〈be−1,be〉 w
systemie z ruchomą kropką są odległe o be−t. W przypadku
odrzucania (obcinania) młodszych cyfr liczba fl(x) różni się od
x nie bardziej niż o be−t, a w przypadku zaokrąglania
prawidłowego nie bardziej niż o be−t/2, tzn.
|
|fl(x)−x| ≤ | ⎧
⎪
⎨
⎪
⎩
| |
|
|
|
| zaokrąglanie prawidłowe . |
|
| |
|
Ponieważ be−1 ≤ x to
Metoda odrzucania jest szybsza od metody zaokrąglania prawidłowego
lecz jej dokładność jest dwa razy mniejsza od tej ostatniej. Prócz
tego błąd w metodzie odrzucania ma zawsze ten sam znak, przeciwny do
znaku zaokrąglanej liczby. Prowadzi to do narastania błedu w
przypadku dużych obliczeń. Pomimo tego, że czas wykonania zaokrągleń
prawidłowych jest dłuższy w porównaniu z czasem zaokrąglania przez
obcinanie, to korzyści z ich stosowania są większe (znoszenie się
błędów o przeciwnych znakach).1
Zilustrujemy teraz zależność (*) w systemie F(10,4,−50,50).
Liczbie x=12.467 w F odpowiada przy zaokrąglaniu z odrzucaniem liczba
fl(x)=.1246×102; błąd względny zaokrąglania wynosi
|
δ(x)=0.007/12.467 ≈ 0.00056 < EPS=10−3=0.001 . |
|
Stosując zaokrąglanie prawidłowe mamy natomiast
<fl(x)=.1247×102 i
|
δ(x)=0.003/12.467 ≈ 0.00024 < EPS=10−3/2=0.0005 . |
|
Parametr EPS charakteryzuje względną dokładność układu F, a jego
wartość zależy od sposobu zaokrąglania. Można go zdefiniować jako
najmniejszą liczbę taką, która dodana do 1 w układzie F daje w
wyniku liczbę należącą do F i większą od 1:
Np. w F(10,4,−50,50) z odrzucaniem, EPS=10−3, bo
|
fl(1+0.001)=fl(.1001×101)=.1001×101 > 1 |
|
i nie można
znaleźć liczby mniejszej o tej własności. Jeśli w F stosujemy
zaokrąglanie prawidłowe, to EPS=0.0005, bo
|
fl(1+0.0005)=fl(.10005×101)=.1001×101 > 1 . |
|
Zadanie 4: Błędy obcinania. Podaj błąd obcinania w systemie F(10,7,-20,20)
Śledzenie błędów zaokrągleń
W fizyce prowadzi się często duże obliczenia numeryczne. Potrzebna
jest zawsze wysoka dokładność obliczeń. W jaki sposób błędy
zaokrągleń propagują się w czasie obliczeń i jaki jest ich wpływ
na końcowe wyniki rachunków? Spróbujemy krótko zastanowić się nad
tym problemem.
Istnieje wiele sposobów minimalizacji błędów końcowych. Pewne
z nich realizuje się sprzętowo (maszyna), a inne programowo (języki).
Tutaj będą nas głównie interesować sposóby programowe.
1
Dla przykładu, zastanowimy się jak można uniknąć dużych błędów
w przypadku wykonywania operacji prostego wyliczania średniej
arytmetycznej (a+b)/2 z liczb a, b. Taka operacja wykonywana
jest bardzo często, np. w przypadku wyznaczania pierwiastka równania
f(x)=0 na odcinku < a, b > metodą połowienia.
Możliwe są dwa sposoby obliczeń!
oraz
Założymy, że obliczenia przeprowadzane są w systemie dziesiętnym z
trzema liczbami znaczącymi, z zaokrąglaniem, i a=0.596,
b=0.600. Według formuły (3) mamy
|
c=(0.596+0.600)/2=1.20/2=0.600. |
|
Wartość dokładna jest równa 0.598.
Według formuły (4)
|
c=0.596+(0.600−0.596)/2=1.196/2 ≈ 1.20/2=0.596+0.004/2=0.598. |
|
Zauważymy, że w tym przykładzie, dla którego wzór (4) daje lepszy
wynik, obie liczby są jednakowego znaku.
2 Rozpatrzymy przykład obliczeń w systemie dziesiętnym
z czterema liczbami znaczącymi, w którym zamiast zaokrąglania
stosuje się odrzucanie. Niech a=−3.483, b=8.765. Według (3)
|
c=(−3.483+8.765)/2=5.282/2=2.641 . |
|
Jest to również wynik dokładny. Według wzoru (4)
|
c=−3.483+(8.765+3.483)/2=−3.483+12.24/2=−3.483+6.120=2.637 . |
|
Jeśli nawet dokonalibyśmy zaokrąglania to wynik nadal różniłby
się od dokładnego gdyż mielibyśmy c=2.642. A więc, w wypadku gdy
liczby a i b różnią się znakami, wzór (3) jest lepszy od wzoru
(4). Można wyciągnąć wniosek, że najlepsza formuła liczenia
średniej polega na tym, by w przypadku gdy (sign(a) ≠ sign(b))
wziąć c=(a+b)/2, a w innym przypadku c=a+(b−a)/2.
Teraz już nikt nie powie, że zna dobrze algorytmy numeryczne.
Przykład ten pokazuje jakie środki ostrożności należy
stosować w przypadku nawet najprostszych operacji i w jaki sposób
wybór formuly (algorytmu) może poprawić dokładność programu.
Przykłady dobrych i złych algorytmów
Ostatnie przykłady pokazały, że wielkość błędów zależy
od sposobu obliczeń, a więc od przyjętego algorytmu.
Podamy jescze inne przykłady algorytmów, które chociaż prawidłowe
z formalnego punktu widzenia, mogą spowodować błędy rachunkowe
powodowane specyfiką arytmetyki komputera.
Rozwiązywanie równań kwadratowych
Rozpatrzmy równanie
Pierwiastki tego
równania są dane przez formuły
|
x1=(−b + |
√
|
b2−4ac
|
)/2a , x2=(−b − |
√
|
b2−4ac
|
)/2a . |
|
Założymy, że rachunki
przeprowadzane są w systemie F(10,4, −50,50) z jedną cyfrą
zapasową i odrzucaniem młodszych bitów. Niech a=1, b=−320,
c=16. Dla wygody, liczby z F będziemy zapisywać w
fortranowskiej notacji z E, tzn. ±.d1d2d3d4Ee, gdzie di
- cyfra liczby z F, a e - cecha. Np. −320=−.3200×103 ∈ F
w formacie E ma postać −.3200E3. Obliczenia przeprowadzone wg.
wzorów dają dla x1:
| |
|
=(.3200E3+ |
√
|
.1024E6−.6400E2
|
/.2000E1 |
| |
| |
|
= (.3200E3+.3198E3)/.2000E1 |
| |
| |
| =.6398E3/.2000E1=.3199E3 = 319.9 , |
| |
|
a dla x2 mamy
|
x2=(.3200E3−.3198E3)/.2000E1=.20000/.2000E1=.1000E0 = 0.1 . |
|
Zostały wyróżnione
pierwsze niepewne na skutek zaokrągleń cyfry.
Dokładne wartości pierwiastków są równe
|
x1=319.950, x2=0.0500078 . |
|
Stąd, bezpośrednie obliczenia wg. wzorów dla
x1 dały dobry wynik, a dla x2 zły gdyż względny błąd
obliczeń x2 wynosi 100%.
Łatwo zrozumieć dlaczego tak się stało. W liczniku ułamka dla
x2 obliczana jest różnica dwóch dużych liczb 320 i 319.8.
Z tego powodu ich starsze cyfry wzajemnie się znoszą, a wynik
odejmowania określają ich młodsze cyfry. Ponieważ ostatnia cyfra
liczby 319.8 zawiera błędy zaokrąglania, więc wynik operacji
odejmowania jest bezwartościowy ponieważ jego pierwsza cyfra
znacząca jest obarczona błędem. Taka sytuacja nosi nazwę
katastrofalnej utraty dokładności. Powstaje ona zawsze tam gdzie
odejmowane są bliskie sobie liczby. Prowadzi to do wzrostu poziomu
błędów obliczeń.
Można uciec od katastrofy utraty dokładności stosując inny algorytm
obliczeń. W rozpatrywanym przypadku należy zastosować następujące
wzory rachunkowe
|
x1 = (−b−sign(b) |
√
|
b2−4 a c
|
)/(2 a) , x2=c/(a x1) , |
|
gdzie sign(b) oznacza znak liczby b.
Dla wybranych poprzednio wartości a, b, c mamy
|
x2= |
.1600E2
.3199
|
=.5002E−1=0.05002 . |
|
Rozsądny wybór algorytmu ustrzegł nas przed niepotrzebnymi błędami.
Należy o tym pamiętać.
Obliczanie funkcji eksponencjalnej
Załóżmy, że chcemy zbudować algorytm obliczania funkcji
eksponencjalnej ex słuszny dla dowolnych x. Ponieważ w
rachunkach funkcja ta będzie pojawiać się bardzo często chcemy by
jej wartość była maksymalnie dokładna. Założymy, że w tym celu
postanowiliśmy wykorzystać rozkład ex w szereg
|
ex=1+x+ |
x2
2
|
+ |
x3
3!
|
+ ... , |
|
który jest zbieżny dla dowolnych rzeczywistych i zespolonych x.
W obliczeniach numerycznych musimy ograniczyć ilość składowych
szeregu do skończonej ich liczby. Liczba ta zależy od x i od
żądanej dokładności.
Załóżmy że należy wyliczyć wartość e−5.5 w systemie
arytmetycznym F(10,5,−50,50). Mamy
e−5.5= 1.0000
-5.5000
+15.125
-27.730
+38.129
-41.942
+38.446
-30.208
+20.768
-12.692
+6.9803
- 3.4902
+ 1.5997
...
-----
+0.0026363.
Szereg został ucięty do 25 składowych ponieważ dalsze składowe nie
mają już wpływy na wartość jego sumy w arytmetyce F. Otrzymaliśmy
więc maksymalnie dokładny wynik w F. Wynik dokładny jest jadnakże
równy 0.0408677! Znów mamy do czynienia z katastrofalną utratą
dokładności.
Wynika to z analizy wartości składowych szeregu. Młodsza cyfra
znacząca każdej składowej większej co do modułu od 10 wpływa na
starszą cyfrę wyniku. Ponieważ składowe szeregu są wyliczone w
przybliżeniu to fakt ten wyjaśnia błąd wyniku końcowego. Aby uniknąć
powstałej sytuacji wystarczy obliczyć dyskutowaną metodą e5.5, a
następnie odwrócić otrzymany wynik:
|
e−5.5= |
1
e5.5
|
=1/(1+5.5+15.125+...)=0.0040865 . |
|
Pokazany przykład posiada czysto ilustracyjny charakter. Zbieżność
zastosowanego szeregu jest bardzo słaba, a to prowadzi do dużej liczby
składowych o ile chcemy zapewnić żądaną dokładność obliczeń. W
praktyce do obliczeń ex stosowane są bardziej efektywne algorytmy.
Rozpatrzone przykłady pokazują w jakim stopniu metoda numeryczna może
zależeć od małych zmian parametrów, a więc danych początkowych. Przykładowo, niech w problemie równania kwadratowego
parametr b=−320.0 zostanie zamieniony na −320.1. Dla x2
obliczanego według wzoru wyjściowego otrzymamy 0.05. Stąd, zmiana o
0.03% tylko jednego współczynnika prowadzi do zmiany wyniku o
200%. (Zauważmy, że dokładna zmiana pierwiastka spowodowana zamianą
b jest równa 0.03%. Dokładny pierwiastek jest równy 0.0499922.)
Stosowany wzór jest wrażliwy na parametry z przedziału b < 0 i
b2 >> 4ac; w innych przypadkach pracuje on całkiem dobrze.
Problem numeryczny może więc w pewnych przypadkach zależeć silnie od
wartości początkowych, a w innych nie. Ponieważ błędy zaokrągleń
można traktować jako niewielkie zmiany danych początkowych więc
stosowanie algorytmu, który jest wrażliwy na tego typu zmiany może
okazać się niebezpieczne. Należy w takich przypadkach poszukiwać
metod alternatywnych.
Obliczanie pierwiastków wielomianów
Poprzednie przykłady pokazują, że metoda numeryczna (algorytm) może
silnie reagować na małe zmiany danych początkowych. Pokażemy teraz, że
istnieją problemy, które same w sobie są czułe na tego typu
zaburzenia. Klasycznym przykładem są obliczenia pierwiastków
wielomianu
|
p(x)=(x−1)(x−2)...(x−20)=x20−210x19+... |
|
Wielomian ten posiada dobrze odseparowane pierwiastki 1, 2, 3, ...,
20. Załóżmy, że współczynnik przy x19 został zaburzony i jest
równy −(210+2−23). Nowy wielomian nieznacznie różni się od
wyjściowego wielomianu p(x) lecz jego pierwiastki różnią się
bardzo. Zapiszemy ich wartości z dokładnością do pięciu cyfr po
przecinku:
Widać wyraźnie, że niewielkie zaburzenie wielomianu p(x)
doprowadziło do znacznych zmian pierwiastków, a niektóre z nich stały
się nawet zespolone Nie miało to miejsca w przypadku dyskutowanego
wcześniej równania kwadratowego. Tam, wystarczyła zmiana
algorytmu. Tutaj, w przypadku wielomianu p(x) problem jest sam z
siebie czuły na zmiany parametrów. Niezależnie od metody obliczeń,
wprowadzenie błędów zaokrąglania, a więc zaburzenie, zawsze doprowadzą
do znacznych zmian w pierwiastkach.
Układ równań liniowych
Przykładem problemu, który jest mało stabilny jest układ
równań
Dokładnym rozwiązaniem jest x=1, y=−1, z=0. Załóżmy, że
zaburzymy prawą stronę układu zastępując (1, 1, 1) przez (1.001,0.999, 1.001). Rozwiązanie wzięte z trzema cyframi znaczącymi jest w
tym przypadku dane przez: x=−0.683, y=0.843, z=0.006. Widzimy,
że zaburzenie prawej strony o 0.1% doprowadziło do wyniku różnego od
poprzedniego o 175% licząc w stosunku do maksymalnie zmienionego
pierwiastka.
Inne przykłady
Rozpatrzmy jeszcze parę przykładów, które demonstrują w jaki sposób
propagują się błędy zaokrągleń.
Przykład algorytmu niestabilnego
Załóżmy, że chcemy obliczyć całkę
|
En= | ⌠
⌡
|
1
0
|
xn ex−1 dx, n=1, 2, ... . |
|
Zachodzi następujący związek rekurencyjny
|
En=xn ex−1 |01 − | ⌠
⌡
|
1
0
|
xn−1ex−1=1−nEn−1, n=2, 3, ... E1=1/e. |
|
Jeśli wykonamy obliczenia według pokazanego schematu w układzie
F(10,6,−50,50) otrzymamy
| |
|
|
0.367879 , E6 ≈ 0.127120 , |
| |
| |
|
|
0.264242 , E7 ≈ 0.110160 , |
| |
| |
|
|
0.207274 , E8 ≈ 0.118720 , |
| |
| |
|
|
0.170904 , E9 ≈ −0.0684800 . |
| |
| |
|
| |
|
Jedyny błąd zaokrąglania pojawił się w przybliżeniu E1 ≈ 1/e i
doprowadził do tego, że E9 jest ujemna chociaż wiadomo, że w
przedziale (0,1) funkcja x9ex−1 jest dodatnio określona i
E9 ≈ 0.0916123. Inne błędy w procesie rekurencyjnych obliczeń
E9 nie zostały wprowadzone.
Przyczyną tak szybkiego wzrostu błędu jest fakt, że początkowy błąd
równy 4.412×10−7 przy obliczaniu En jest mnożony przez
n!. W szczególności, przy n=9 błąd w E9 jest równy
4.412×10−7×9! ≈ 0.1601 i jest prawie równy
rzeczywistej wartości E9. W ten sposób wybrany algorytm okazał się
niestabilnym ponieważ w każdym kroku błędy stają się coraz większe.
Jeśli zapiszemy nasz algorytm w postaci
|
En−1= |
1−En
n
|
, n = ..., 3, 2 , |
|
to łatwo zauważyć, że w n-tym kroku błąd nie powiąksza się, lecz
zmniejsza się n razy, tzn. dany algorytm jest stabilny. Widomym
jego mankamentem jest to, że nie znamy początkowego przybliżenia.
Niezależnie jednak od tego z jakim błędem wybierzemy początkową
wartość dla n >> 1 błędy będą bardzo szybko maleć w każdym kroku
obliczeń. Możliwe do przyjęcia przybliżenie początkowe może być
oszacowane następująco
|
En= | ⌠
⌡
|
1
0
|
xn ex−1 dx ≤ | ⌠
⌡
|
1
0
|
xn dx = |
xn+1
n+1
|
|01 = |
1
n+1
|
. |
|
Jeśli weźmiemy np. E20 ≈ [1/21] to błąd przy E19
będzie już pomnożony przez 1/20 i będzie wynosił 0.0024. Kiedy
dojdziemy do E15 błąd będzie mniejszy od 4×10−8 (a więc
mniejszy od rzeczywistego błędu zaokrąglenia) i będzie malał z powodu
stabilności metody. Poczynając od E15 wartości En są dokładne
do szóstego miejsca co odpowiada możliwości zaokrągleń na ostatnim
miejscu.
Czy zawsze 10×0.1=1?
Rozpatrywany przykład jest cenny z tego względu, że liczba 0.1
często brana jest jako wielkość kroku przy całkowaniu równań
różniczkowych oraz jako parametr w innych algorytmach numerycznych.
Jeśli maszyna korzysta z układu dziesiętnego, tzn. b=10 wówczas
równość 10×0.1=1 jest bezwarunkowo spełniona. Jeżeli b=2 to
tak nie jest ponieważ 0.1 nie posiada skończonego rozwinięcia w
potęgi 2−1. Rzeczywiście, w układzie dwójkowym 0.1 jest równe
|
(0.1)10=(0.0001100110011...)2 . |
|
W niektórych komputerach reprezentacja 0.1 ma w Fortranie postać
|
(0.1)10=2−3×0. |
1100110011... 001100
40−miejsc
|
| 11 ... . |
|
Widać stąd, że kompilator wziął 0.1 z niedomiarem gdyż miejsce 41-e
zawiera 1. Jeśli pomnożymy tę wielkość przez 10 (na komputerze) i
odejmiemy od wyniku jedynkę to otrzymamy 2−40 ≠ 0. Jeśli
przedstawimy 0.1 jako 1/10 to po wykonaniu dzielenia w komputerze
otrzymamy inną reprezentację liczby 0.1:
|
(0.1)10=2−3×0. |
110011001100...001101
40
|
. |
|
W tym przypadku 10×0.1=1.
Zobaczmy teraz, czy spełniona jest równość
|
|
10
∑
1
|
0.1 = 0.1+0.1+... +0.1 = 1 . |
|
Ponieważ rozwinięcie dwójkowe 0.1 jest nieskończone to odpowiedź
jest negatywna. W przypadku rozpatrywanej reprezentacji różnica
między 1 i sumą ∑110 0.1 wynosi 2−39−240.
Propagacja błędów danych początkowych w algorytmach
rozwiązań zwyczajnych równań różniczkowych
Rozważmy prosty przykład numerycznego rozwiązywania problemu
Cauchy'ego zwykłego równania różniczkowego
Rozwiązaniem jest funkcja
Przeanalizujemy algorytm Eulera z ustalonym krokiem h. Przybliżone
rozwiązanie (1) un+1 w punkcie xn+1 jest dane
przez2
Wielkość u0 jest przybliżeniem wartości początkowej y0. Różnica
między u0 i y0 może pochodzić z niedokładności w danych
początkowych lub z błędów zaokrągleń maszynowych. Mogą też wystąpić
obie te przyczyny jednocześnie. Wielkość u0 zawiera więc błąd
e0=y0−u0. Zauważmy także, że w metodzie Eulera używamy
przyliżenia 1+hλ funkcji eλx.
Zapiszemy teraz wyrażenie określające globalny błąd En+1 w
(n+1)-szym kroku całkowania. Ponieważ
|
un+1=(1+hλ)n+1u0=(1+hλ)n+1(y0−e0) , |
|
to błąd En+1 jest równy
| |
|
| | (7) |
| |
|
|
y0e(n+1)hλ−(1+hλ)n+1(y0−e0) |
| | (8) |
| |
|
| [e(n+1)hλ−(1+hλ)n+1]y0 +(1+hλ)n+1e0 . |
| | (9) |
|
Globalny błąd posiada dwie składowe. Pierwsza pochodzi z przybliżenia
funkcji ehλ przez (1+hλ), druga opisuje propagację
błędu e0 z warunku początkowego. Jeśli |1+hλ| > 1, to
składowa druga rośnie ze wzrostem n i w ostateczności staje się
dominującą częścią globalnego błędu En+1. Jeżeli chcemy
ograniczyć propagację błędu dla przypadku λ < 0 musimy zadbać o
to by spełniony był warunek
|
|1+hλ| < 1 lub h < 2 / |λ| . |
|
Otrzymany warunek na ograniczenie kroku całkowania h nosi nazwę
warunku stabilności. W przypadku jego niespełnienia przybliżone
rozwiązanie problemu będzie niestabilne. Tak więc maksymalna wartość
kroku całkowania hmax zależy zarówno od parametrów problemu (w
naszym przypadku od parametru λ) jak również od zastosowanego
algorytmu obliczeń. Warunek stabilności h < 2/|λ| został
otrzymany z konkretnej aproksymacji 1+hλ funkcji
ehλ.
W jednym z algorytmów rozwiązywania równań różniczkowych,
tzw. metodzie Runge-Kutta 4-go rzędu, funkcję ehλ
aproksymuje się wyrażeniem
|
ehλ=1+hλ+ |
(hλ)2
2!
|
+ |
(hλ)3
3!
|
+ |
(hλ)4
4!
|
. |
|
To nakłada inne ograniczenia na h. W tym przypadku dokładne
wyznaczenie warunku stabilności w jawnej postaci jest trudne do
wyliczenia, można jednak powiedzieć, że stabilność ma miejsce dla
takich h, dla których wartości przedstawionego wielomianu są
absolutnie mniejsze od 1.
Jeżeli λ > 1 to nierówność 1+hλ > 1 jest spełniona dla
dowolnego h > 0, a to oznacza, że w każdym kroku procesu całkowania
obserwuje się wzrost błędów lokalnych. W tym wypadku niestabilność nie
jest oczywista ponieważ dominującą składową błędu globalnego En+1
staje się w tym wypadku pierwsza składowa. Niezależnie od tego jak
mały krok h wybierzemy, różnica
e(n+1)hλ−(1+hλ)n+1 będzie przy dostatecznie dużych
n większa od (1+hλ)n+1. Tego typu problem nosi nazwę
źle uwarunkowanego.
Jeśli w analogiczny sposób przeprowadzimy analizę ogólnego przypadku
y′=f(x,y), to można dojść do następujących ogólnych wniosków:
a) jeśli ∂f/∂y < 0, to wpływ błędów lokalnych
zmniejsza się dla h spełniających warunek stabilności
b) jeśli ∂f/∂y > 0, to wpływ< błędów lokalnych
rośnie niezależnie od tego jak małe jest h.
W wielu problemach znak ∂f/∂y zmienia się w
przedziale całkowania, tzn. błędy lokalne są raz mniejsze, a raz
większe. W tym wypadku dobrze jest wykonać całkowanie tak by wiedzieć
jaki jest znak ∂f/∂y i w ten sposób kontrolować
sytuację. W prostym przypadku y′=λy, λ > 0 lepiej jest
całkować w kierunku mniejszych x, tzn, z ujemnym krokiem h.
Oczywiście, każde równanie różniczkowe wymaga oddzielnego podejścia.
Zadanie 5: Liczby dwójkowe. Zapisz w systemie binarnym liczby 2013, 777,
100, 0.1
Zadanie 6: Różne systemy liczbowe. Zapisz liczby z zadania poprzedniego w
systemie ósemkowym i szesnastkowym
Zadanie 7: Systemy. Napisać (Fortran) program przeliczania liczb
z jednego systemu liczbowego (inpsys) do innego (outsys)
Zadanie 8: Systemy liczbowe. Napisz program w Pascalu, który wszystkie
działania (+,-,*,/) będzie wykonywał w arytmetyce F(b,t,L,U), gdzie
danymi będą b, t, L i U.
Footnotes:
1Załóżmy, że wszystkie błędy
zaokrągleń są tej samej wielkości, ich znaki są niezależne i
pojawiają się jednakowo często. Z centralnego twierdzenia
granicznego teorii prawdopodobieństwa wynika, że prawdopodobny błąd
sumy n dodatnich składników przy stosowaniu metody odrzucania jest
w przybliżeniu √n razy większy niż błąd metody zaokrąglania
prawidłowego.
2Ogólnie y′=f(x,y) i rozwiązania poszukujemy zapisując
pochodną y′ w postaci y′=(yn+1−yn)/h, gdzie yn=y(xn), i
xn+1=xn+h, co wynika z definicji pochodnej, a więc jest
słuszne dla h→ 0.
File translated from
TEX
by
TTHgold,
version 4.00.
On 30 Oct 2013, 10:58.

